项目简介
gitee地址:TMRNic/导航工具箱 MatlabApp
项目主页:地理系下地磁场向量计算的Matlab函数接口 - NavSpace - Technology Exchange
地磁场的作用
地磁场对导航系统的意义重大,它提供了一种自主、抗干扰、隐蔽且低成本的导航方式,能够实现全天候、全地域的导航,不受地形、气候等外部环境的限制。地磁导航技术不产生长期积累误差,可作为全球导航系统如GPS的重要补充和备份,尤其在卫星信号受到干扰或遮蔽时。它与惯性导航技术互补,提供丰富的特征量用于导航匹配,增强了导航系统的可靠性和准确性。此外,地磁导航技术在军事领域具有广泛的应用潜力,特别适用于地下、水下等卫星信号接收受限的场景,为特定环境下的导航需求提供了有效的解决方案。
地磁场模型
WMM(世界地磁场模型)和IGRF(国际地磁参考场模型)都是描述地球主磁场及其变化的数学模型,matlab中有igrf相关函数。
模型目的和应用:
WMM:WMM模型主要用于导航定位系统和航向姿态测量系统,它是由美国国家海洋和大气管理局的国家环境信息中心(NOAA/NCEI)和英国地质调查局(BGS)共同研制的。
IGRF:IGRF模型是国际地磁场与高空物理联合会(IAGA)给出的,用于表示地磁场及其长期变化在全球分布的数学模型。
模型数据源:
WMM:WMM模型综合利用地面和卫星磁测数据构建,因此它能够较好地描述内源场部分。
IGRF:IGRF模型主要描述的是主磁场部分,它更多地依赖于高精度的实验数据。
模型精度和误差:
根据对比分析,WMM模型和IGRF模型在描述地磁场分布情况时精度相当,WMM模型达到了与IGRF模型同等的描述地球主磁场的标准。
在某些区域,WMM模型的某些地磁要素精度明显优于IGRF模型,尤其是在中国大陆区域,WMM的某些地磁要素精度明显优于NGDC给出的全球估计精度。
不同台站的三要素相对误差值变化范围有大有小。WMM模型的变化范围基本与IGRF保持一致,但波动范围又明显有所收敛。
模型更新和时效性:
WMM:WMM模型更新较为频繁,以适应地磁场快速变化的需要,例如WMM2020模型有效期为2020.0至2025.0。
IGRF:IGRF模型更新周期较长,通常每五年更新一次,以反映地磁场的长期变化。
模型的区域性特征:
IGRF模型精度呈现显著的区域性分布特征,而WMM模型与地磁台站的相对误差主要代表了卫星磁场模型和台站观测精度的差异。
综上所述,WMM和IGRF模型各有特点,WMM模型在某些区域和要素上可能提供更高精度的地磁场数据,而IGRF模型则提供了一个全球性的、长期的地磁场参考。在实际应用中,根据不同的需求和条件,可以选择适合的模型进行地磁场的研究和导航定位。
MATLAB函数
wmm提供了c语言程序和一个参数文件,为了在matlab中使用,直接通过混合编程建立matlab函数接口,实现matlab中的wmm磁场计算。
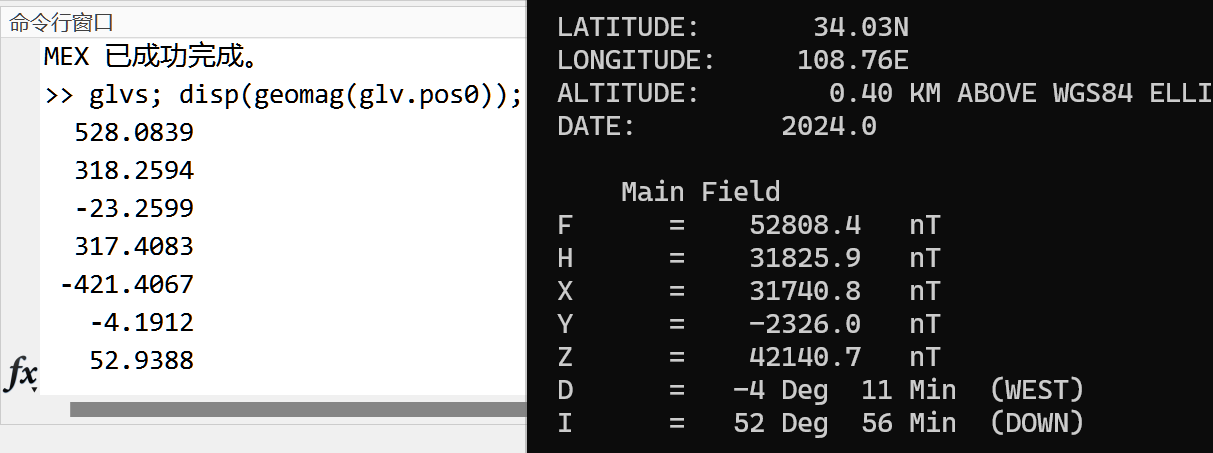
matlab与cpp计算结果对比
使用说明
下载geomag.mexw64和WMM.COF,将两者放到相同路径下,例如"\psins240513\base\geomag\";
直接调用res = geomag(pos)得到磁场数据;
输入变量:pos -- 位置向量(纬经高),单位为弧度、弧度和米,符合psins工具箱格式,可以在工具箱中使用该函数,"geomag(trj.avp(k,7:9))"。
输出变量:mag -- 7维向量,依次为“F、H、E、N、U、D、I”。
| 变量 | 定义 | 单位 |
|---|
| F | 总的磁场强度 | mGauss |
| H | 水平磁场强度 | mGauss |
| E | 东向磁场强度 | mGauss |
| N | 北向磁场强度 | mGauss |
| U | 天向磁场强度 | mGauss |
| D | 磁偏角(北偏东为正) | deg |
| I | 下倾角 | deg |
更新计划
参考资料