轨迹描述
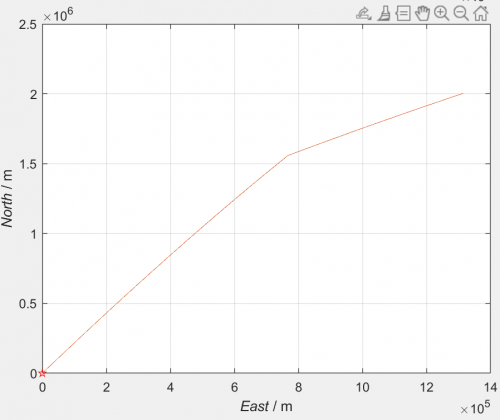
轨迹水平位置变化如图所示。
导航时间约43 h,运动距离约1272 n mile。
IMU数据分析
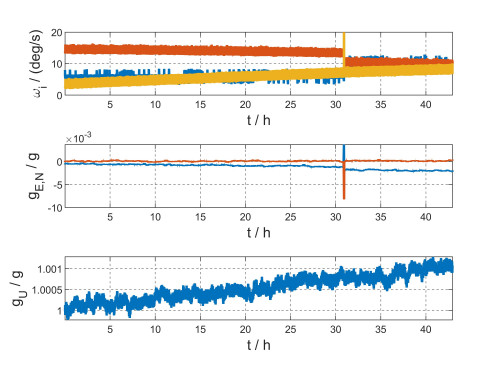
IMU数据如下图:
显然随着位置变化,陀螺敏感的角速度不断发生变化,其中包含了地球自转角速度分量的改变。即使载体一直处于水平状态,但是纬度变化也会使各轴陀螺的输出缓慢变化,这和常见的短时导航IMU数据有明显的差异。
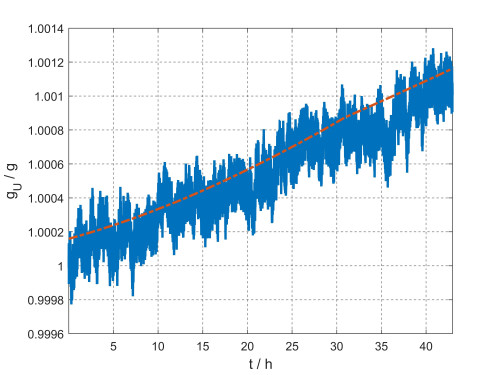
此外,从天向加计的输出也能看出来,随着纬度变高,天向加计的输出也不断变化,这重力加速度分量的变化是相符的。
纯惯导解算分析
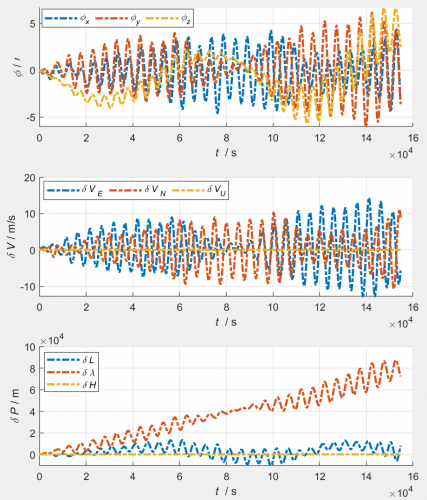
之前已经写了一篇文章分析静基座下长航时捷联惯导误差变化规律,这组长航时数据虽然是动基座的,但是动态特性较低,因此误差传播规律和静基座下的分析结果相似。
航向失准角的地球周期误差很明显,水平失准角则存在接近地球周期的调制。
位置误差中东向位置误差发散,而北向位置误差则在10海里范围内波动。
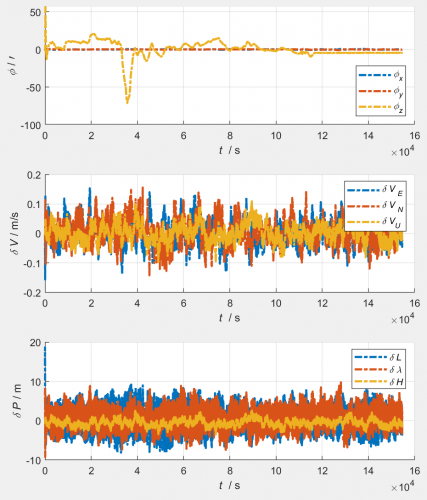
组合导航解算分析
组合导航误差如下:
速度和位置误差变化没有什么特别的,重点是姿态误差。在组合的前30小时中,航向失准角的收敛情况较差,但是在航向发生变化时,航向失准角快速收敛并保持稳定。
数据文件
NavSpace网盘-43h长航时导航数据