捷联惯导误差方程为:
\left\{ \begin{aligned}
&\boldsymbol{\dot{\phi}} = \boldsymbol{\phi} \times \boldsymbol{\omega}_{in}^{n} + \delta\boldsymbol{\omega}_{in}^{n} - \boldsymbol{C}_b^n \delta\boldsymbol{K}_\mathrm{g} \boldsymbol{\omega}_{ib}^b - \boldsymbol{\varepsilon}^n \\
&\delta\boldsymbol{\dot{v}}^n = \boldsymbol{f}_{\mathrm{sf}}^n \times \boldsymbol{\phi} + \delta\boldsymbol{g}^n - \left(2\delta\boldsymbol{\omega}_{ie}^n+\delta\boldsymbol{\omega}_{en}^n\right)\times\boldsymbol{v}^n - \left(2\boldsymbol{\omega}_{ie}^n+\boldsymbol{\omega}_{en}^n\right)\times\delta\boldsymbol{v}^n - \boldsymbol{C}_b^n \delta\boldsymbol{K}_\mathrm{g} \boldsymbol{f}_{\mathrm{sf}}^b + \boldsymbol{\nabla}^n \\
&\delta\dot{L} = \frac{1}{R_M+h}\delta v_N - \frac{v_N}{\left(R_M+h\right)^2}\delta h \\
& \delta\dot{\lambda} = \frac{\sec L\delta v_E + v_E \sec L \tan L \delta L}{R_N+h} - \frac{v_E \sec L}{\left(R_N+h\right)^2} \delta h \\
&\delta\dot{h} = \delta v_U
\end{aligned} \right.
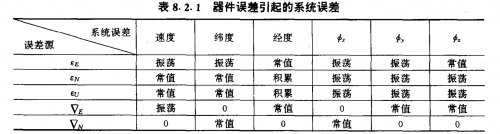
这是一个时变方程,没有解析解。但是在静态条件下,方程退化为定常方程,《惯性导航》中给出了不同类型误差的周期性,惯导误差中存在三个周期项:
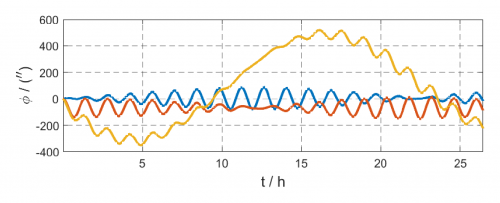
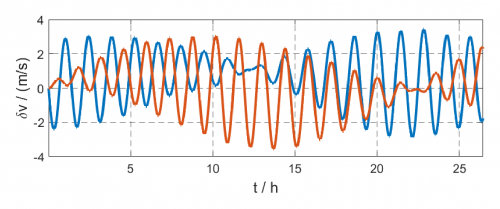
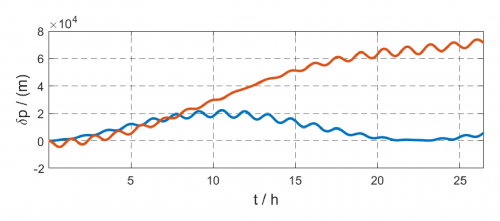
这里利用最近采集的24h数据进行静基座纯惯性解算,计算导航误差如下:
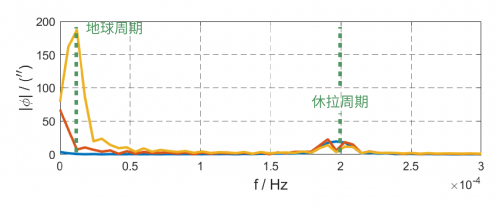
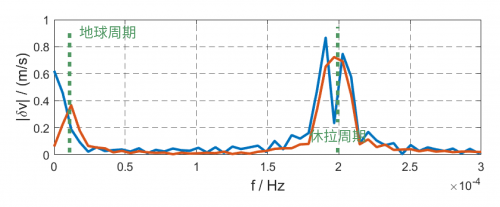
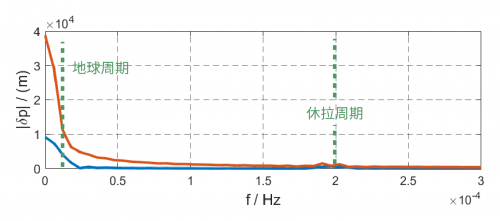
绘制误差数据的频谱图如下:
从图中可以看出来,导航误差中地球周期和休拉周期非常明显。试验测试时间太短,如果使用一个月的IMU数据就能看出明显的地球周期和傅科周期。