长曝光星轨照片
20250203-195154 曝光1733s Pos:33°09'04"N 107°12'48"E 航向102俯仰50
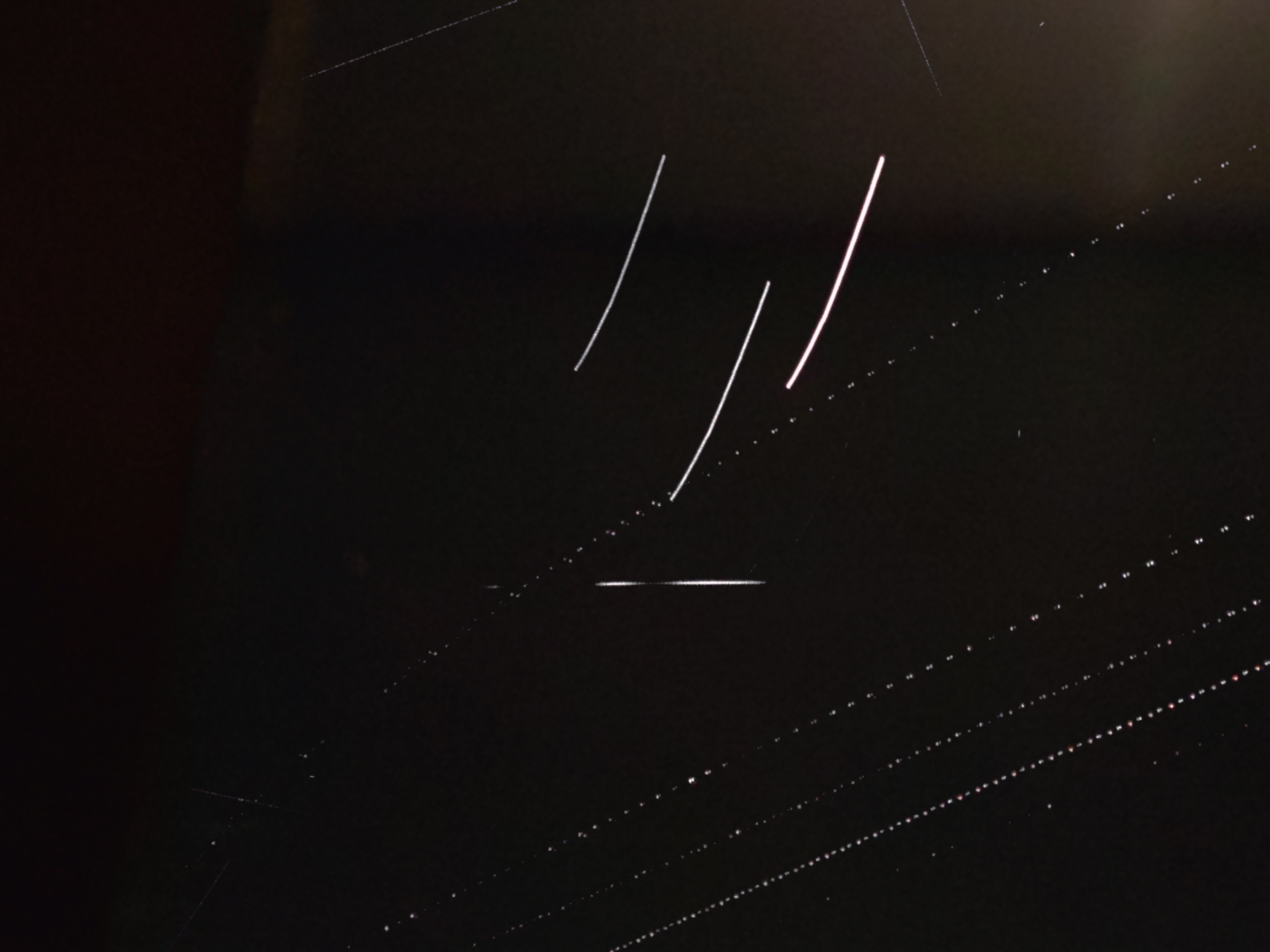
不清除图像中间的横向线条是什么造成的,和飞机的图像对比,它应当移动得比飞机慢很多。
20250203-202057 曝光1394s Pos:33°09'04"N 107°12'48"E 航向102俯仰50
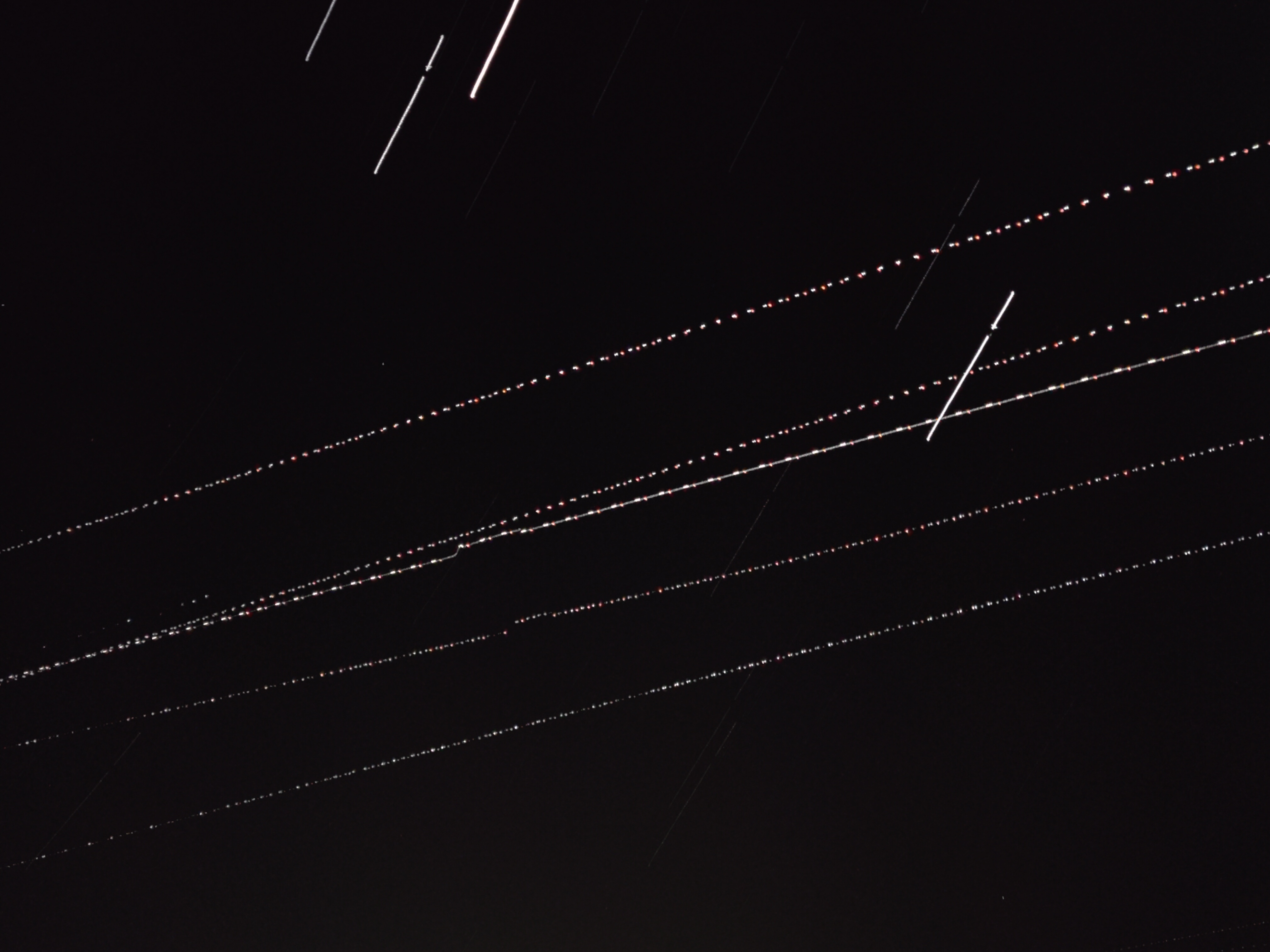
从这两图上可以明显看出地球自转引起的恒星位置变化,只是受限于摄像头性能,只能在10s曝光以上才能观测到清晰明确的恒星,不能进行动态测量。但是这对于真正的星敏感器就没有任何难度,可以轻松完成观星,并根据星图进行匹配。
DeepSeek给出的星敏感器参数:
高精度导航(深空) 分辨率 2048×2048,FOV 8°×8°,极限星等 +7 等
低轨卫星(LEO) 分辨率 1024×1024,FOV 20°×20°,帧率 5 Hz
传感器参数对比
| 参数 | 星敏感器 | 手机摄像头 |
|---|
| 传感器类型 | 高灵敏度科学级CMOS/CCD(抗辐射) | 消费级CMOS(优化色彩和动态范围) |
| 像元尺寸 | 3.45μm10μm(更大像元提升灵敏度) | 0.8μm2.4μm(小像元追求高像素密度) |
| 分辨率 | 512×5124096×4096(高精度导航需求) | 12MP200MP(追求高像素,但实际裁剪使用) |
| 动态范围 | >60 dB(需同时捕捉亮星和暗星) | 1014档(HDR算法增强) |
| 量子效率(QE) | 峰值60%80%(背照式技术,近红外敏感) | 峰值30%50%(优化可见光波段) |
| 读出噪声 | <2 e⁻(低温制冷或低噪声设计) | 210 e⁻(依赖多帧降噪算法) |
光学系统对比
| 参数 | 星敏感器 | 手机摄像头 |
|---|
| 视场角(FOV) | 5°×5°20°×20°(小视场提升单星定位精度) | 60°120°(广角/超广角,覆盖更多场景) |
| 焦距 | 20100 mm(长焦距压缩视场) | 等效24200 mm(多镜头组合) |
| 光圈(F/#) | F/1.4F/4(大光圈提升进光量) | F/1.5F/2.4(大光圈优化低光拍摄) |
| 光学畸变 | 严格校准(径向畸变<0.1%) | 依赖算法校正(鱼眼畸变常见) |
星图与航班信息
在第2张图的拍摄过程中,出现了5架客机,查询了4个航班的信息,在网上搜索到这个航路可能是G212,北京飞西安和成都应当都是走这个航路。左上角的三颗星在星图软件中查询到的结果是火星、参宿四和南河三,这个可能并不准确。
