摇摆条件可观测性问题分析
仅依赖舰船的摇摆运动来实现传递对准具有较高的技术挑战性,即使采用姿态与速度的联合测量方法,也难以全面准确地估计出所有状态参数。正如严老师在其文章中所指出的那样,通过小幅度的摇摆运动来精确估计航向误差存在固有的局限性。
先前开发的用于传递对准轨迹仿真的程序结构过于复杂,尽管它能够提供高精度的仿真结果,但其设计过程却显得极为繁琐。为此,基于PSINS工具箱重新编写了一个新的传递对准仿真程序,并计划利用该程序进行一系列测试,以评估在摇摆基座条件下传递对准状态估计的有效性和准确性。
主子惯导间安装偏角和杆臂误差的影响
参考《惯性导航》(第3版)—— 9.10.2 传递对准中的匹配量
传递对准轨迹仿真
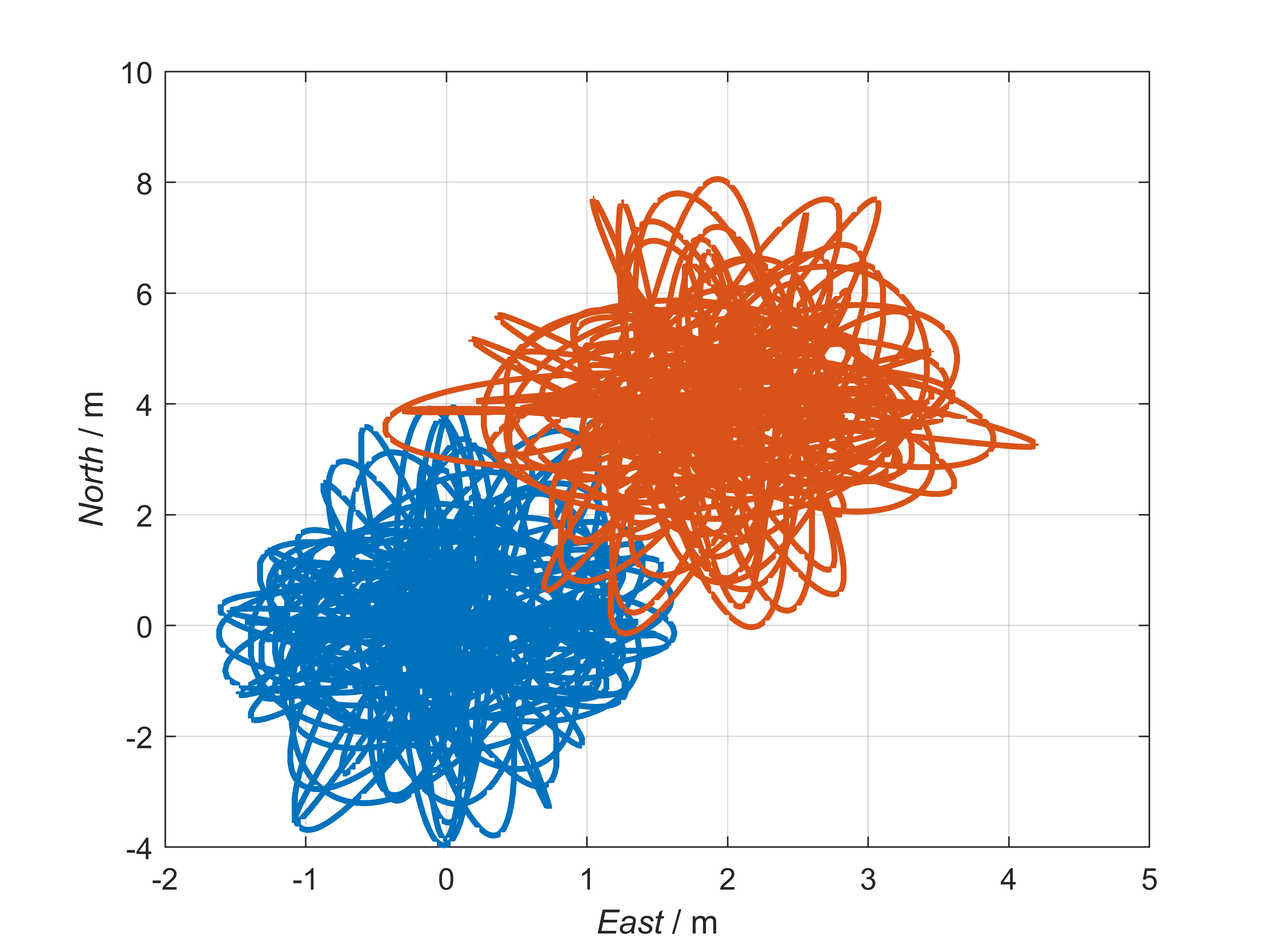
摇摆状态
摇摆幅度达到30°,周期10s左右,振荡和升沉运动幅度24m。
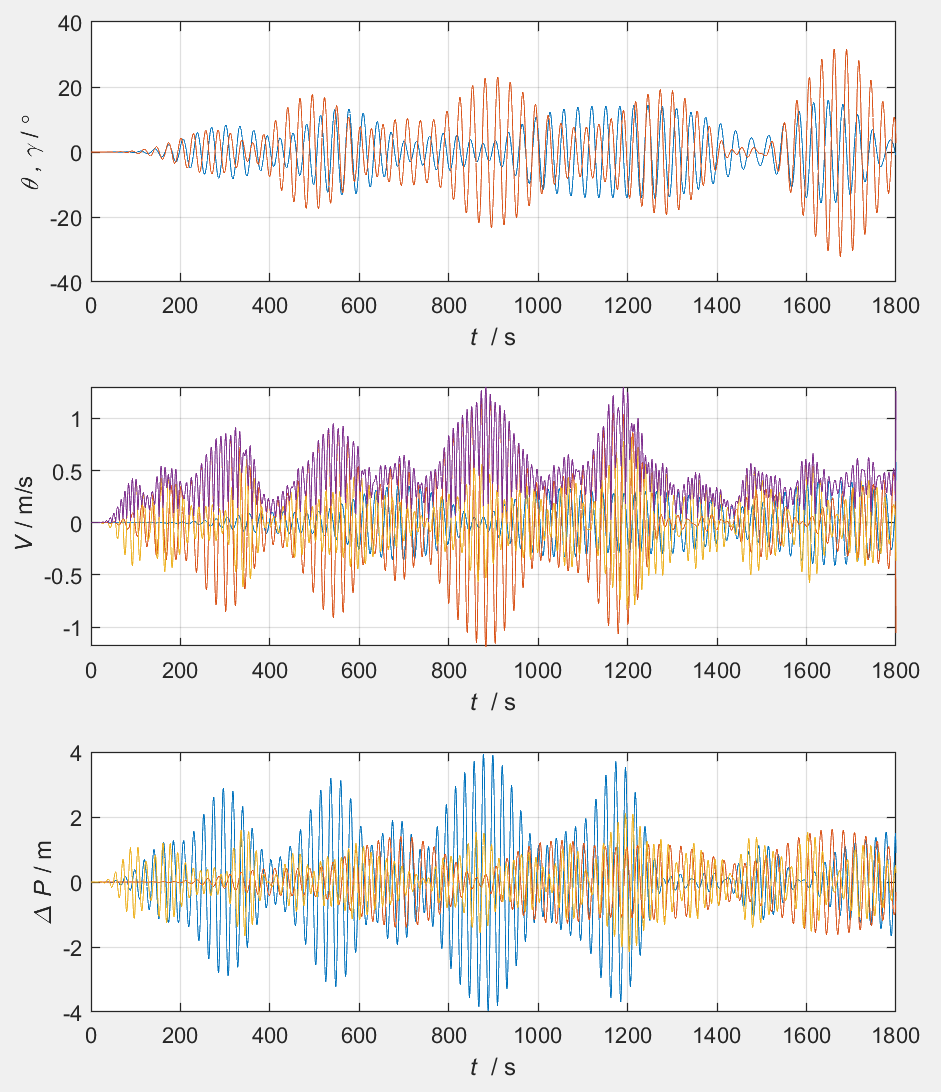
由于杆臂误差存在,主子惯导之间角运动类似,空间上存在偏差。
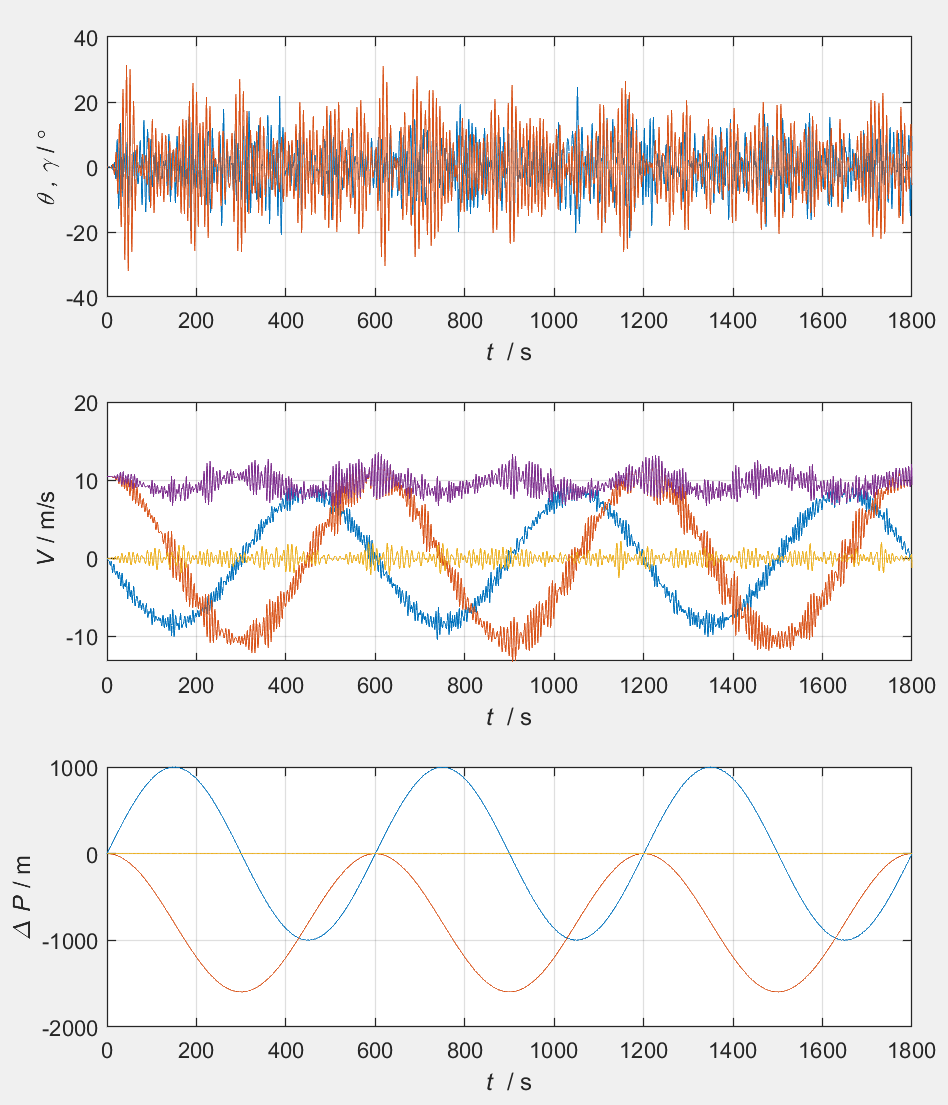
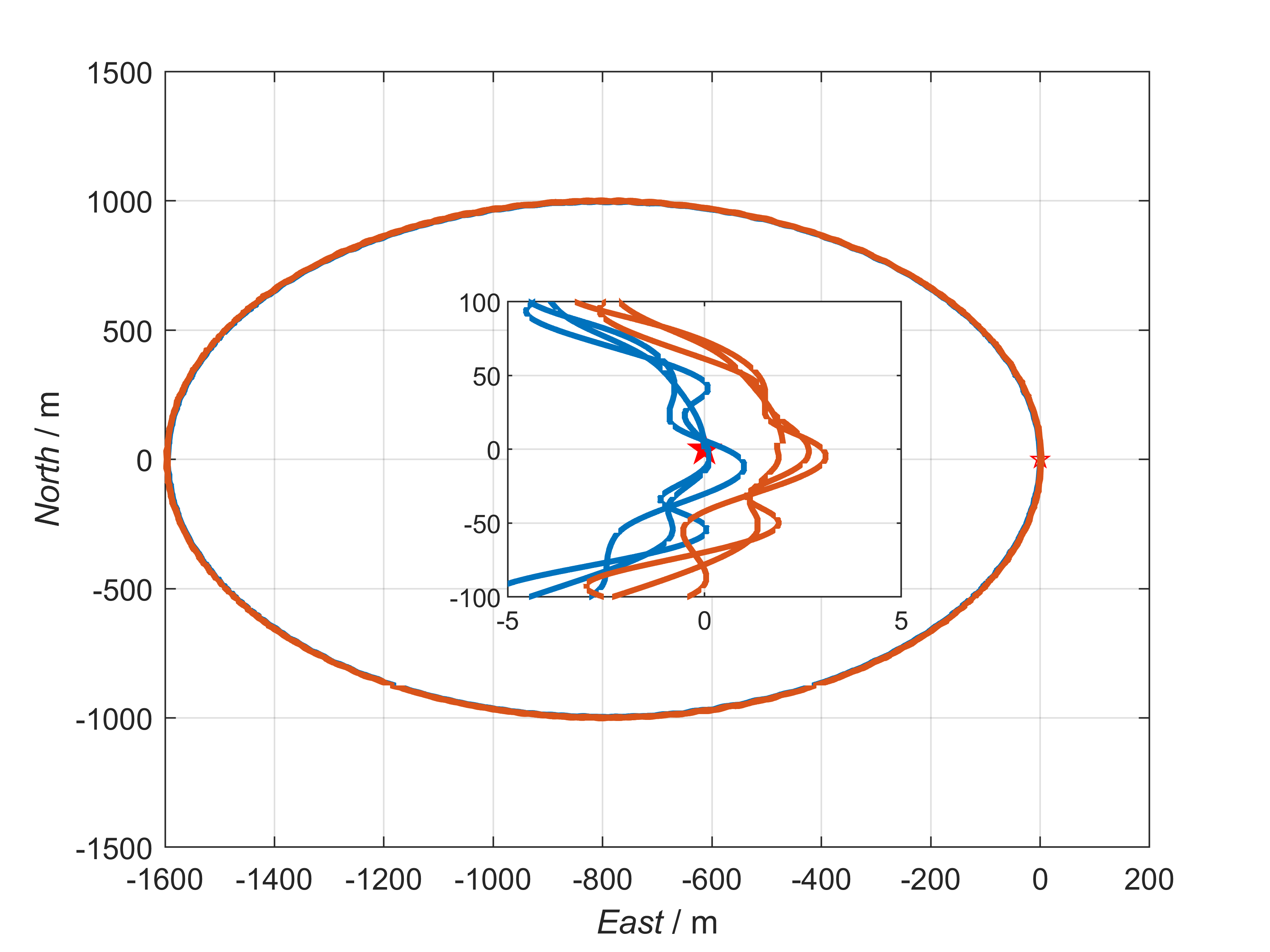
摇摆+圆周运动状态
除摇摆外,加入一个周期600s的圆周运动。加入的机动比较小,估计对可观测性的提升不大。
主子惯导传递对准仿真
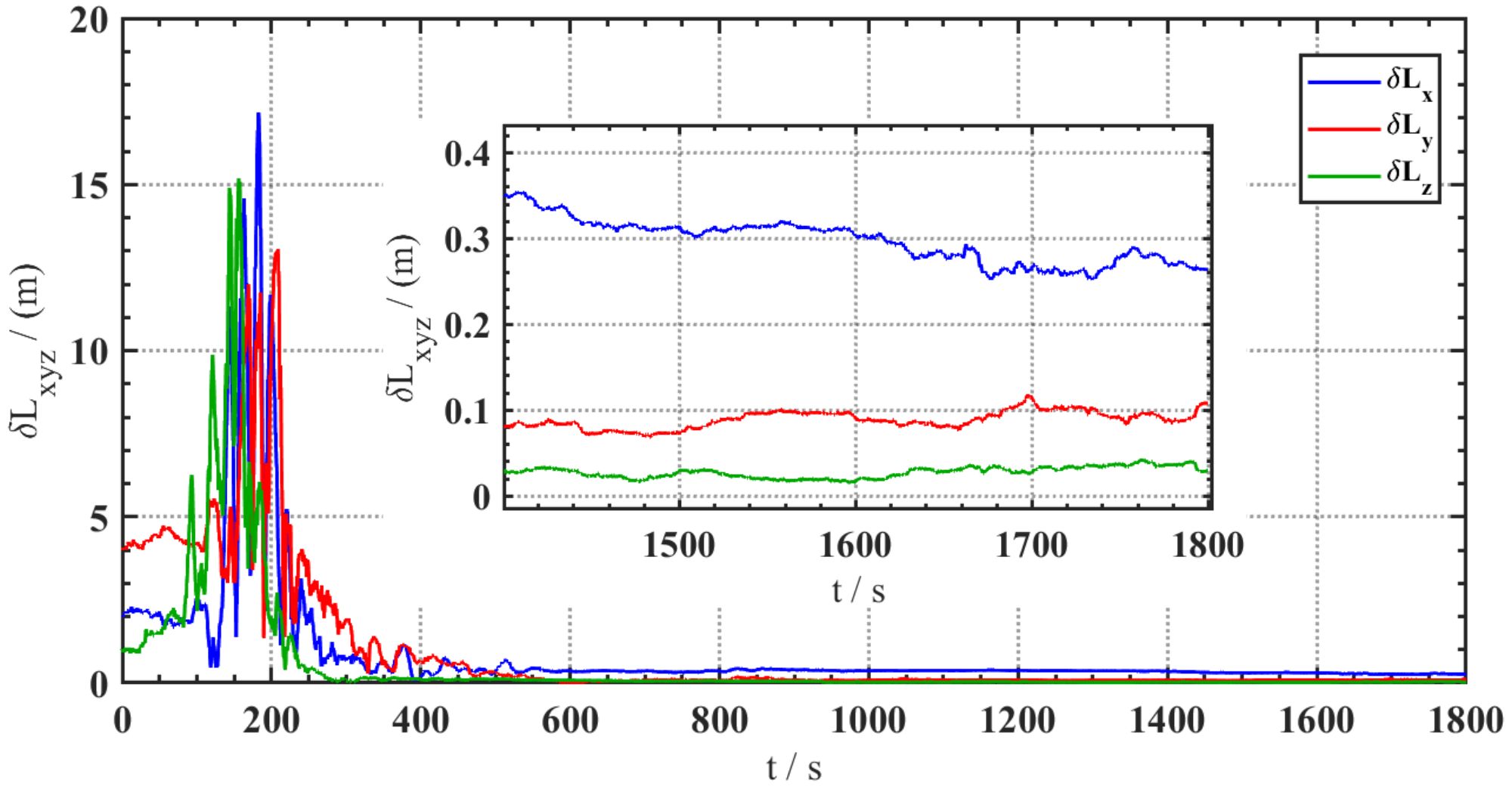
仅摇摆运动
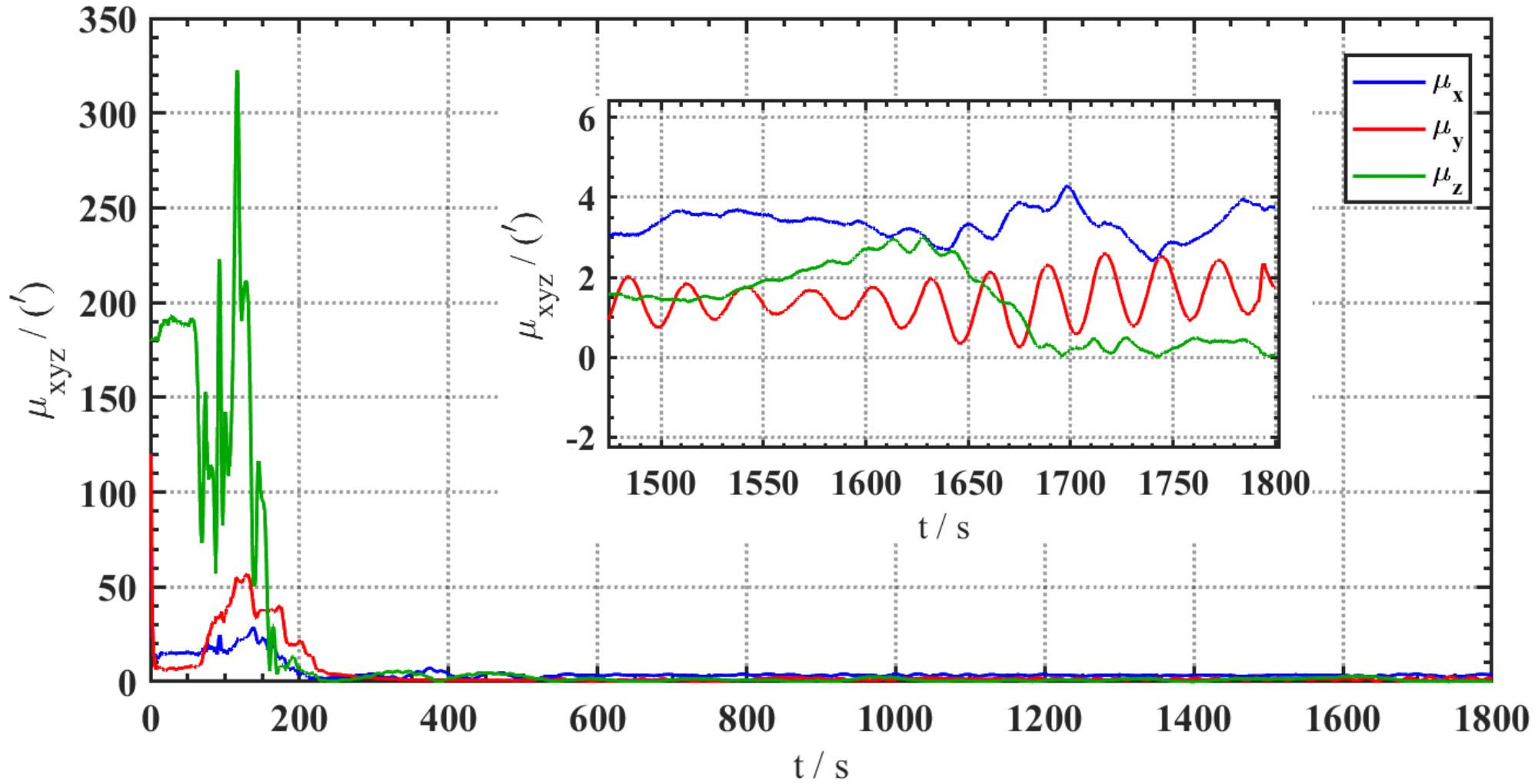
安装偏角估计结果:
估计误差(min): 3.7596, 1.7307, 0.0585;
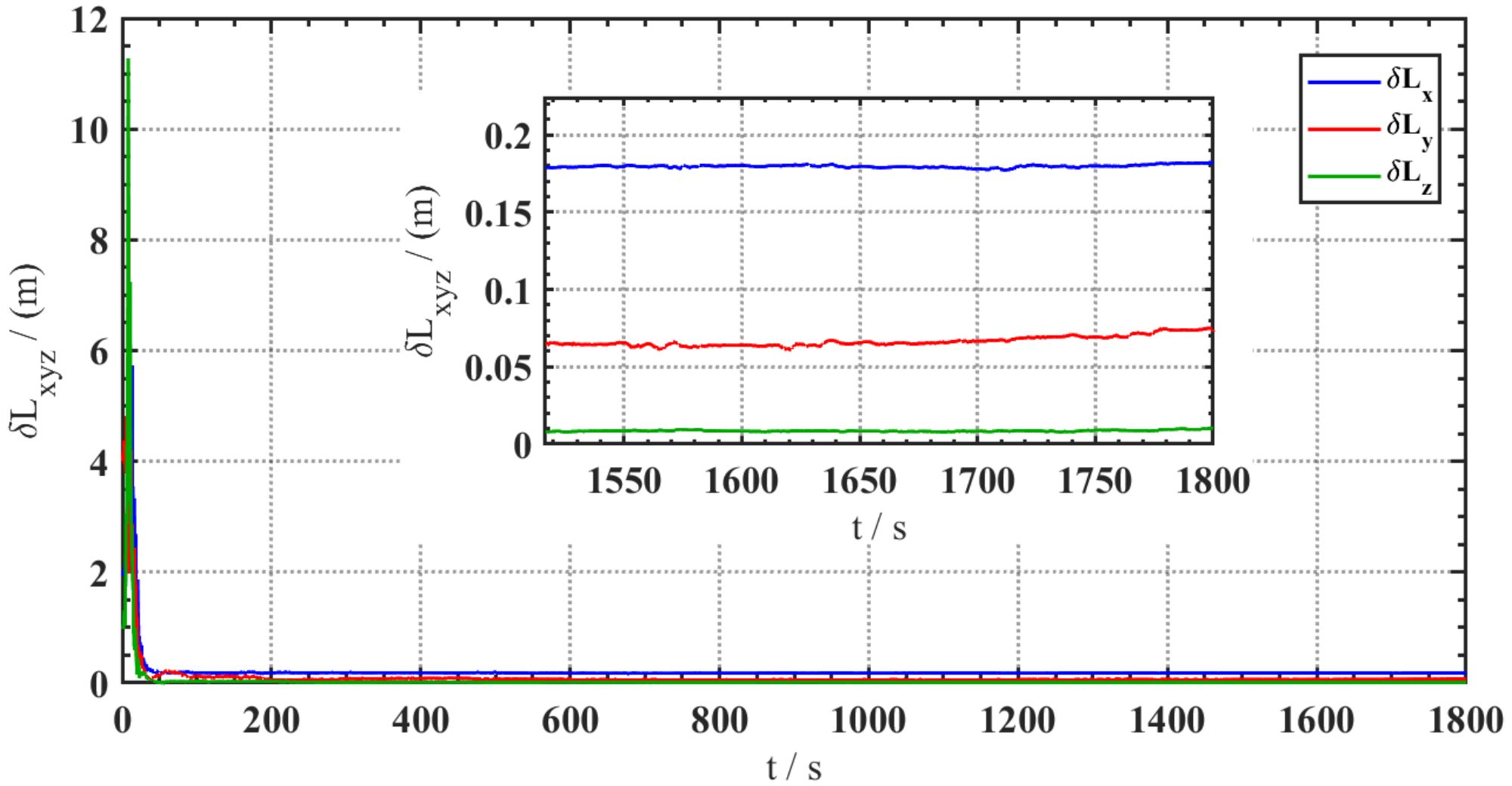
摇摆+圆周运动
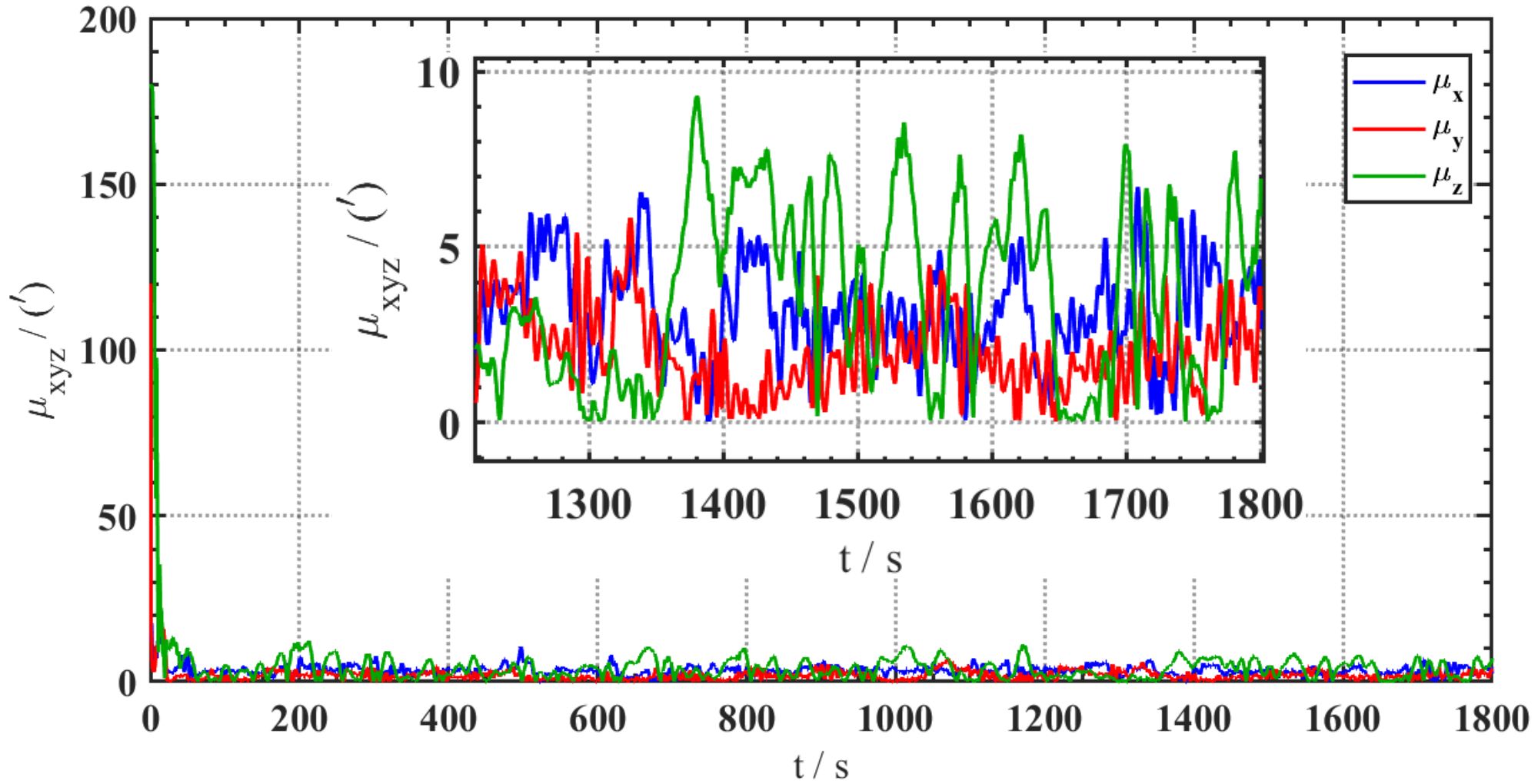
安装偏角估计结果:
估计误差: 2.6406, 3.1831, 6.9565;
结果分析
当只有摇摆运动时,主子惯导安装偏角的估计误差小于圆周运动,仿真条件的圆周运动降低了安装偏角的估计精度,但是提升了杆臂向量的估计精度。
该结果也说明摇摆条件是可以实现传递对准中全部安装偏角辨识的。
【分析】摇摆条件下传递对准难以辨识是有条件的,可以探索可以辨识安装偏角和不可以辨识安装偏角的边界。
1800s摇摆基座传递对准仿真