问题复现
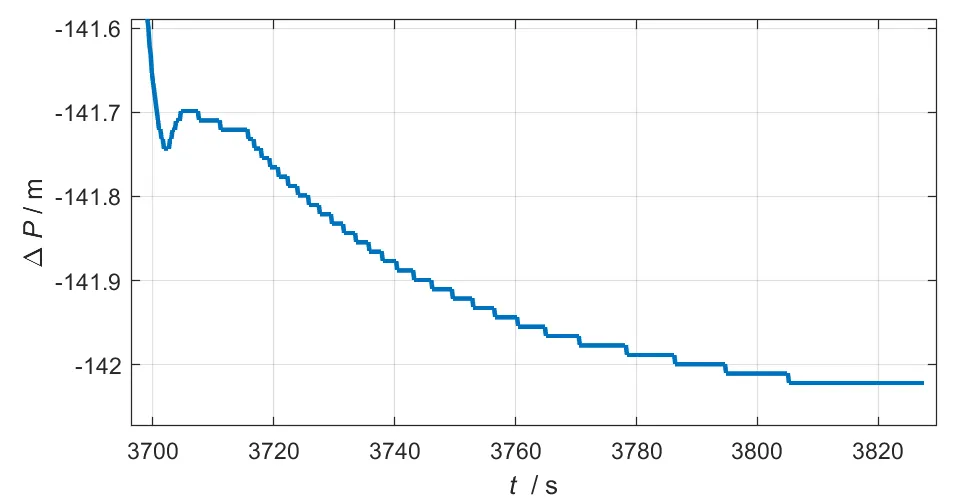
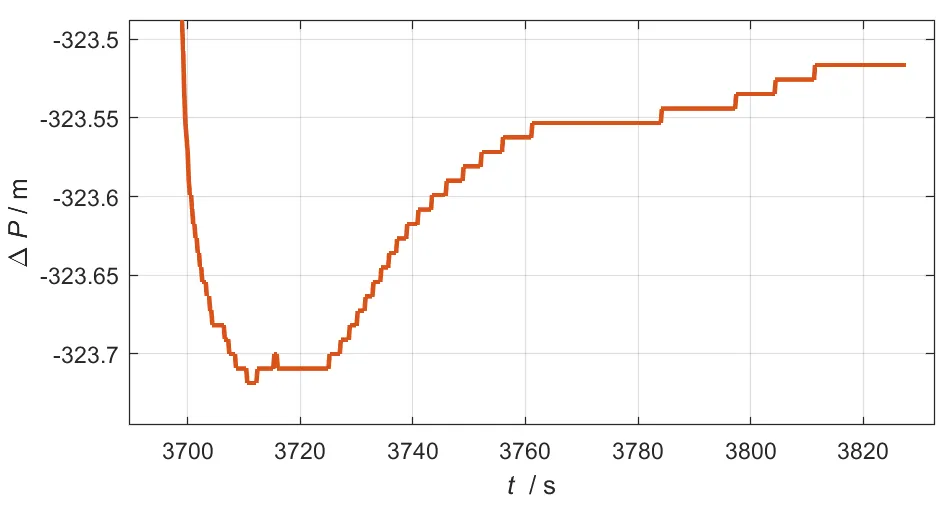
在载体静止以后,GNSS的位置数据没有在定值附近波动,而是逐渐收敛到真实位置。
图中的试验数据GNSS位置偏差仅为0.4m,这一量级对组合导航的影响一般不大,但是如果这类位置误差较大,而且持续时间更长,会对滤波器产生何种影响呢?
仿真测试
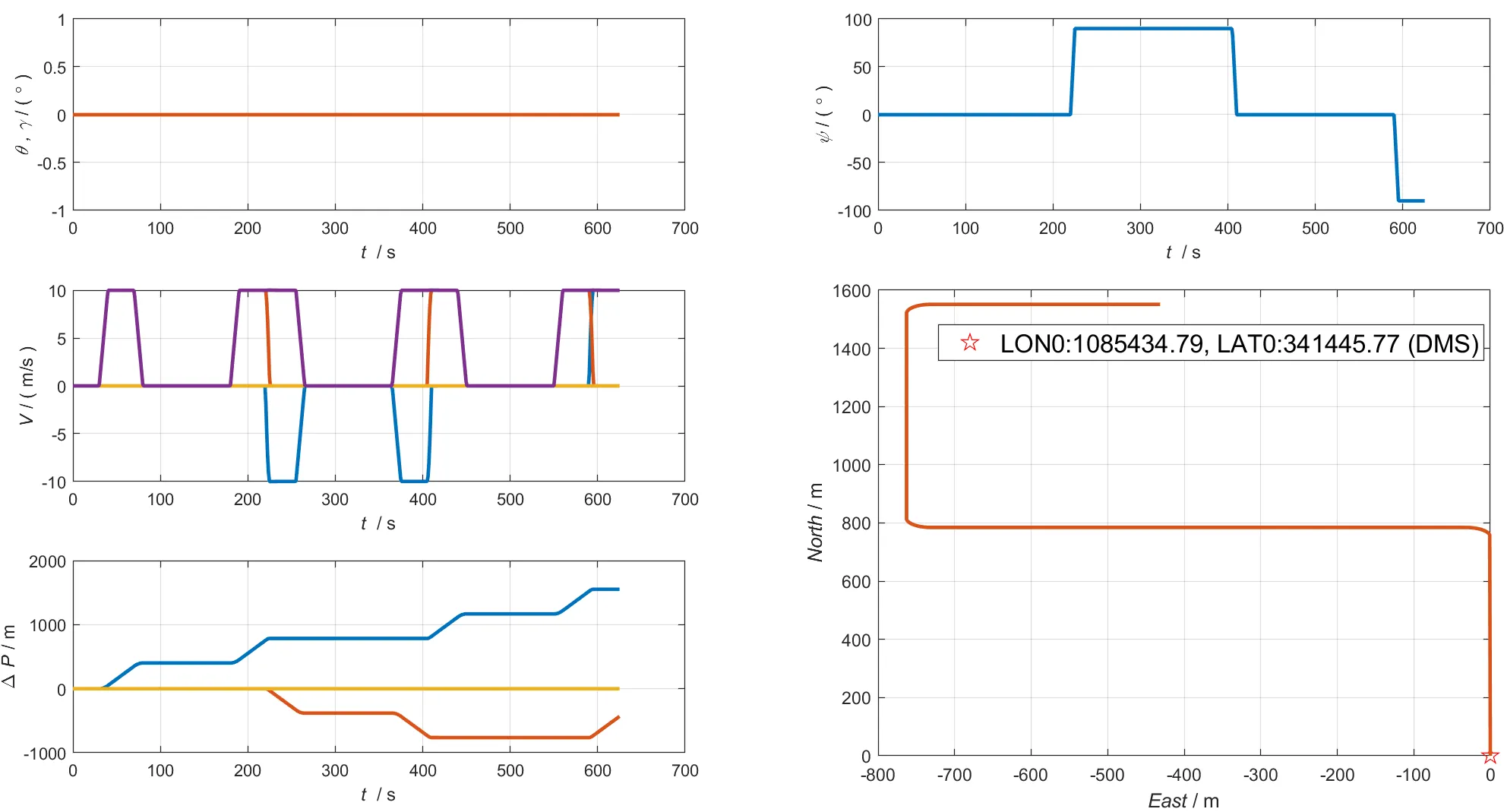
轨迹仿真
进行600s仿真,载体经过三次转弯,每一段直线运动都会进行一次停车。在最后一次停车后为GNSS加入一个缓慢增加的误差,模拟位置的漂移。
正常情况组合导航
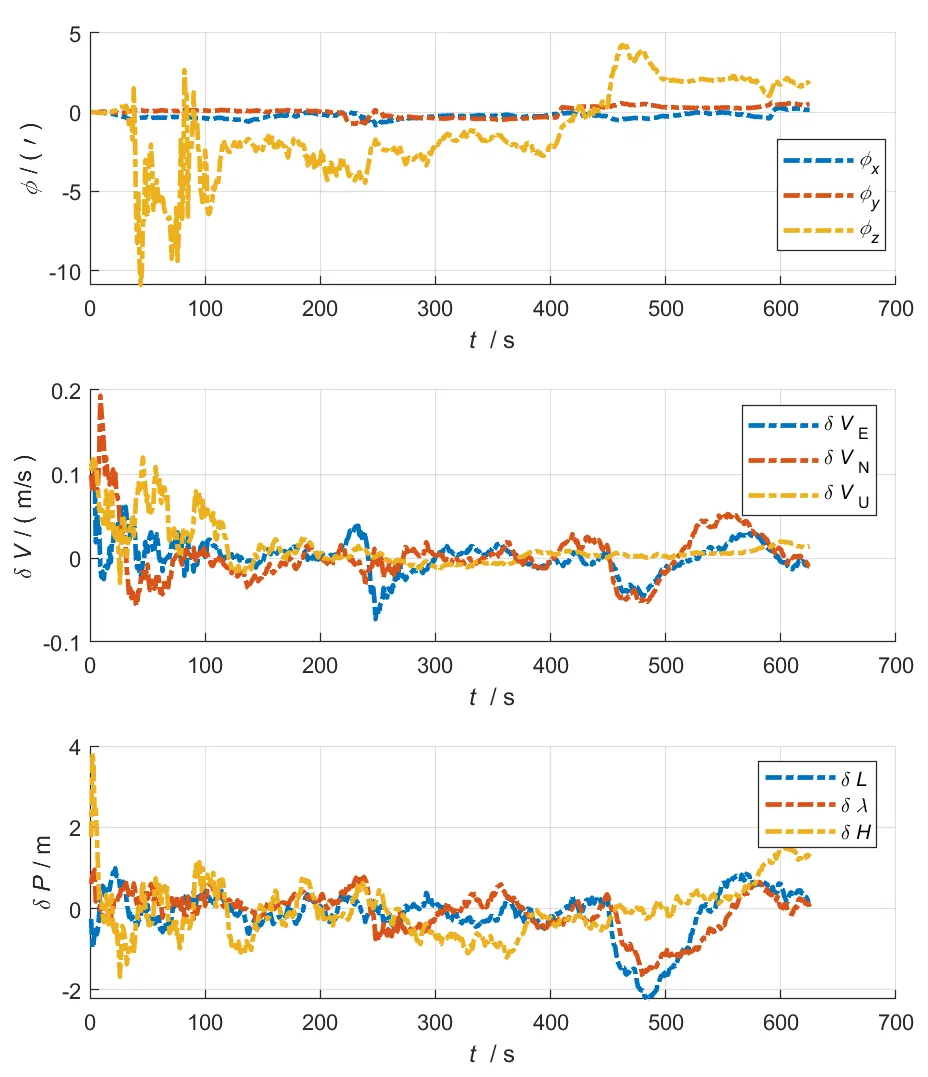
正常的组合导航结果如下:
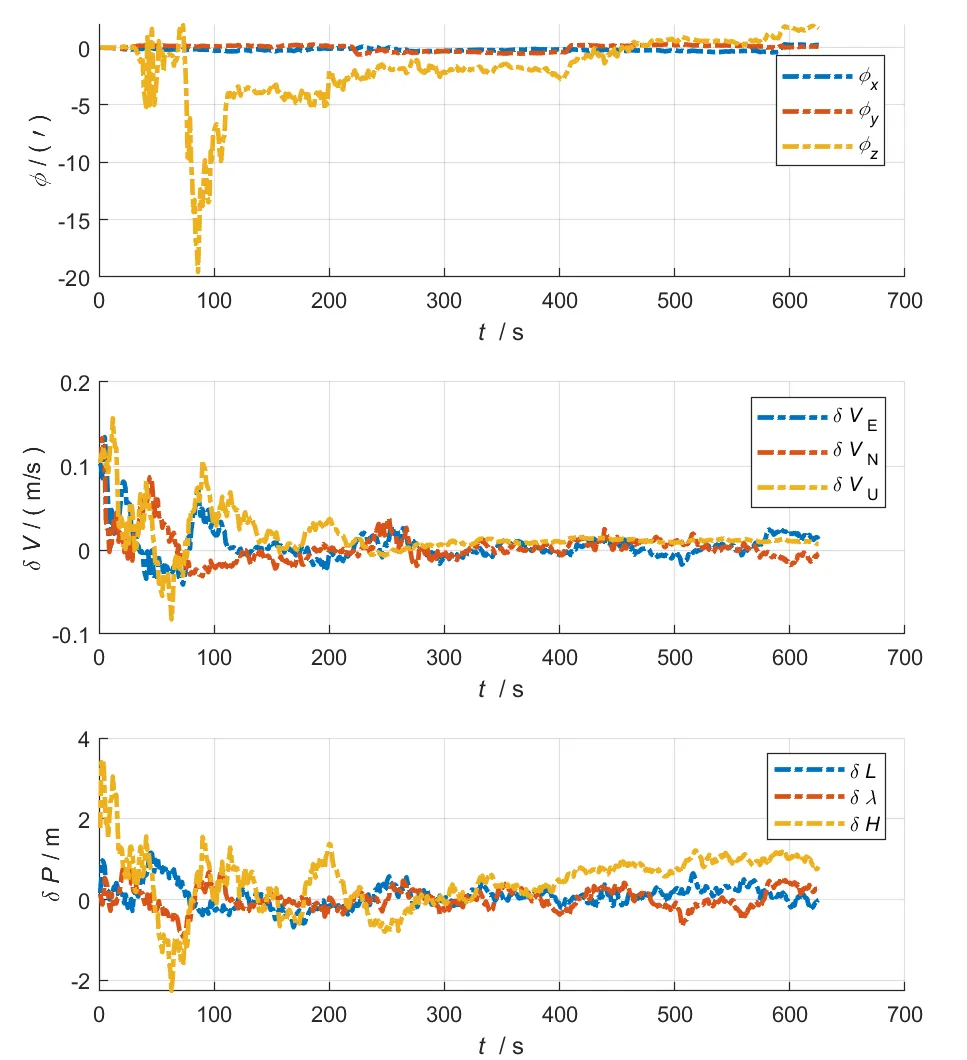
姿态、速度位置误差都收敛,航向误差收敛较慢。
GNSS漂移的影响
在450s到500s的停车阶段,航向失准角因量测异常变大。
卡方检测能否检测出来
卡方检测是最常用的组合导航量测异常检测方法,对于GNSS输出中常见误差,遮挡引起的误差变大,多径效应引起的偏移等量测异常都能被屏蔽,防止其影响组合导航结果。
那么对于这种缓慢变化的GNSS误差能否被检测出来呢?
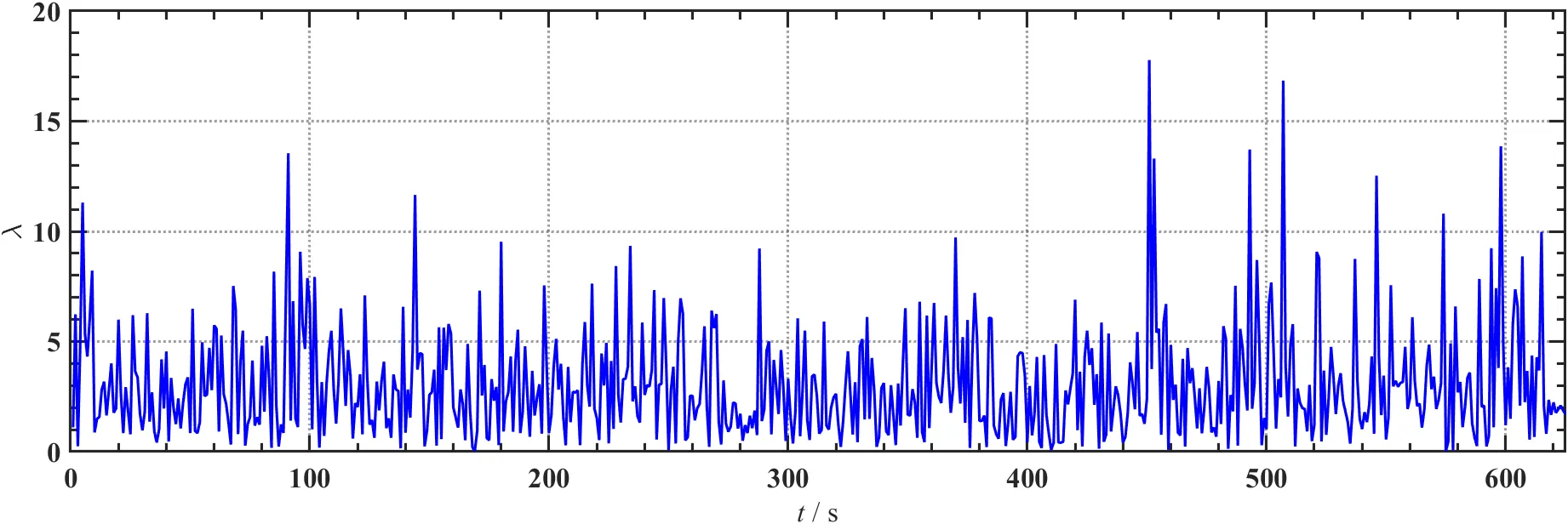
从图上来看,450s-550s的量测异常阶段并不明显,这也就意味着很难通过卡方检测,辨识GNSS的这种缓慢漂移。
疑问?
载体静止条件下这种漂移对于GNSS来说是常态吗?之前的试验数据中,当载体静止后GNSS输出会马上到0附近。输出的位置变化曲线也只有噪声,没有这种明显的缓慢变化趋势。