手机内陀螺仪和加速度计静态数据的奇怪特征
最近处理低成本MEMS-IMU数据,发现陀螺仪和加速度计的静态数据都存在一些奇怪的特征。
联想到之前处理手机内置IMU的数据,没有仔细分析其静态数据,就再次把小米手机采集静态数据拉出来画个图,然后发现了更多奇怪的特征。
1 消费级Mi10Pro陀螺仪和加速度计静态数据
采集了约5500s的静态数据,当时只是分析了Allan方差,这次画一下10s平滑的结果。
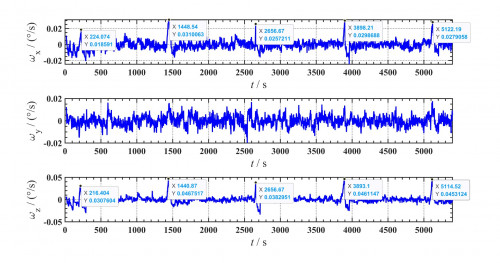
a 陀螺仪数据
角速度输出,地球自转肯定敏感不到,误差还是挺大的,当时做组合导航效果很差。
很明显,每隔1224s会出现一个峰值,在x轴和z轴上表现明显,而在y轴上几乎看不出来。这也可以解释之前组合导航的时候,偶尔出现误差变大的情况,当时以为是GNSS异常导致的,现在看来问题可能出在IMU上。这消费级的IMU确实只能用来粗略定姿,或者作为一个学习平台。
感觉这个App采集数据没有关系,毕竟程序只是每0.01s读取数据并保存。
目前我怀疑是手机系统的问题,毕竟不是直接从传感器读取数据,二是调用系统的API。
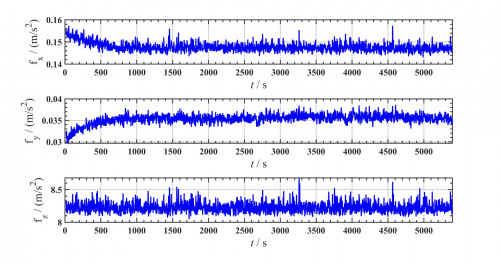
b 加速度计数据
加速度计数据不存在那种周期性的异常,只是在启动以后1000s内存在明显的漂移,这应当是温度引起的,毕竟低成本的器件不需要温补。
z轴加计没有这种情况,但是输出只有8.2m/s2,只能认为存在较大的加计零偏了。
2 车规级MEMS-IMU静态数据
虽然同样属于MEMS-IMU,但是数据看起来就要比消费级好很多。
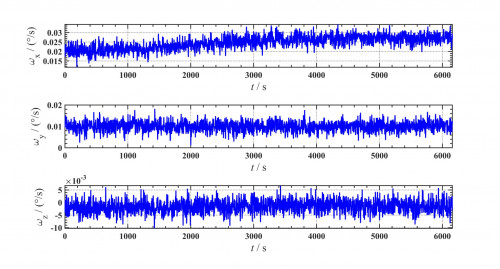
a 陀螺仪数据
角速度数据比较稳定,只有x轴存在一点漂移。但是还是不能测地球自转,也就是说不能自对准,至少无法完成航向对准。
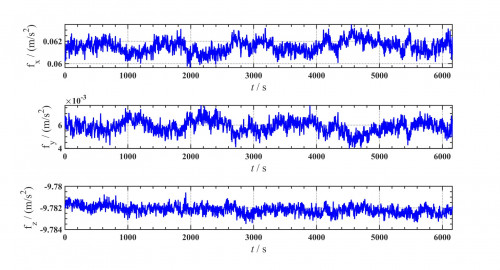
b 加速度计数据
加速度计数据中,x轴和y轴一直存在类似于随机游走的漂移。
3 惯性级IMU静态数据
惯性级的IMU数据肯定更加稳定了,利用网上公开的静态数据分析一下。
PSINS网站:一组千分之二的激光惯导静态测试数据
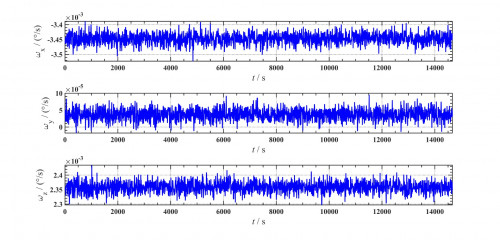
a 陀螺仪数据
角速度数据没有明显的周期性,也没有出现随温度变化的情况。
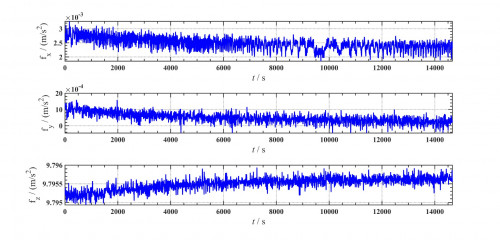
b 加速度计数据
加速度计输出中,x轴和y轴存在缓慢的漂移。x轴加速度计8000s以后的数据出现了异常的波动。
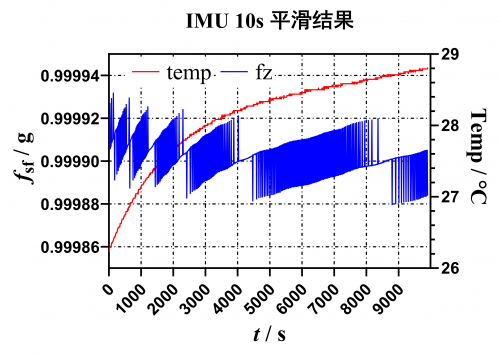
这组公开数据应当是没有进行温补的,温补后的加速度计输出应当是这样: