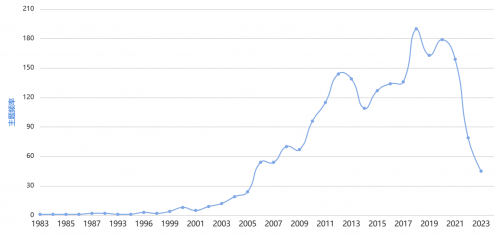
旋转惯导还是研究热点吗?
查了一下旋转惯导相关的发文量(国内),发现在17-21年的发文量达到最大,那近两年是怎么了?只能研究工程技术,不好发文章了吗?
误差分配动态对比
设置捷联惯导误差参数:
| 误差项 | 数值 | 单位 |
|---|
| 陀螺零偏 | 0.01 | deg/h |
| 加速度零偏 | 500 | ug |
| 角度随机游走系数 | 0.001 | deg/√h |
| 速度随机游走系数 | 50 | ug/√Hz |
| 采样频率 | 100 | Hz |
静基座条件捷联惯导误差分配结果动态变化
静态单轴转动条件捷联惯导误差分配结果动态变化
旋转调制机理
惯性导航旋转调制是一种误差自补偿技术,其原理是通过调制惯性器件的零位误差来消除其对系统精度的影响。具体来说,惯性导航系统通过陀螺仪和加速度计来测量运动载体的角速度和加速度信息,然后经积分运算得到运动载体的姿态角、速度和瞬时位置等导航参数。然而,陀螺仪和加速度计的输出误差主要由零位常值误差、标度因数误差、安装角误差和随机误差组成,这些误差会随着时间的推移而累积,导致导航系统精度下降。
旋转调制技术的原理是将惯性测量元件(陀螺仪和加速度计)安装在旋转调制器上,通过旋转调制器的旋转来调制惯性器件的零位误差。具体来说,旋转调制器以一定的角速度旋转,使得惯性器件的零位误差也会随着旋转而变化。通过引入这个变化的零位误差,可以抵消掉惯性器件的固定零位误差对导航系统精度的影响。
在旋转调制技术中,旋转调制器的旋转速度是关键参数,它需要根据惯性器件的零位误差的性质和系统要求来选择。通常情况下,旋转调制器的旋转速度需要选择合适的值,使得惯性器件的零位误差的变化能够与积分运算的累积效果相匹配。
通过旋转调制技术的原理,可以实现对惯性器件零位误差的自补偿,从而提高惯性导航系统的精度和稳定性。这种技术已经广泛应用于各种惯性导航系统中,包括军事、民用等领域。
误差分配原理
惯性导航误差分配原理是指将惯性导航系统的误差按照不同的误差源进行分配,以便更好地评估和降低系统误差。惯导系统的误差源主要包括元件误差、安装误差、初始条件误差、原理误差、计算误差、运动干扰以及其他误差。
元件误差是指陀螺仪、加速度计等惯性传感器的误差,包括零位误差、标度因数误差、安装角度误差等。安装误差是指惯性传感器在安装过程中产生的误差,包括安装角度误差、安装位置误差等。初始条件误差是指在惯导系统初始化过程中,计算机在解算方程时的初始给定误差。原理误差是由于方便计算省略的高阶分量、近似模型等造成的误差。计算误差是计算机在计算过程中产生的误差。运动干扰主要是振动和冲击造成的误差。其他误差包括导航系统的电子组件之间互相干扰造成的误差等。
惯导误差分配原理是根据不同的误差源对系统精度的影响程度进行分配,一般采用方差分配法进行分配。方差分配法是指将惯导系统的总方差按照不同的误差源进行分配,使得每个误差源对系统精度的影响都有一个明确的贡献值。通过方差分配法,可以确定每个误差源对系统精度的影响程度,从而更好地评估和降低系统误差。
在实际应用中,惯导系统的精度通常是通过实验测试来验证和评估的。实验测试包括实验室测试和实地测试,实验室测试可以在实验室内模拟各种飞行条件和环境因素,以测试惯导系统的性能和精度;实地测试则是在实际飞行中通过与其它导航系统进行比较来评估惯导系统的精度。通过实验测试的结果,可以对惯导系统的误差源进行分析和优化,以降低系统误差和提高导航精度。
Gitee-SINS误差分配分析程序-MatlabAPP

References
Yan, G., Yang, X., Su, X., Weng, J., & Qin, Y. (2018). Error distribution method and analysis of observability degree based on the covariances in kalman filter. Chinese Control Conference, CCC, 2018-July, 4900–4905. https://doi.org/10.23919/ChiCC.2018.8482583
Yang, X., Yan, G., Liu, F., Guan, B., & Li, S. (2022). Analysis Method of Strapdown Inertial Navigation Error Distribution Based on Covariance Matrix Decomposition. Chinese Control Conference, CCC. https://doi.org/https://doi.org/10.48550/arXiv.2203.11810
严恭敏,翁浚. (2019). 捷联惯导算法与组合导航原理 (第1版). 西北工业大学出版社.