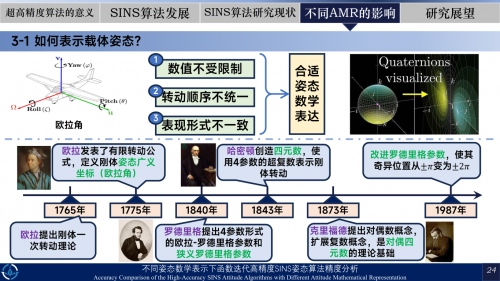
欧拉角定义
欧拉角,也就是在导航中常使用的姿态角,是最长接触的姿态数学表达形式。但是实际上欧拉角存在数值不受限制、转动顺序不统一和表现形式不一致三个问题。用四元数或者姿态阵表示姿态可以避免这些问题,但是又不够直观。
欧拉角的数值和其定义有关,当选择“右前上”为载体坐标系、“东北天”为导航坐标系时,常采用“3-1-2”的欧拉角定义,即先绕z轴转动航向角,再绕x轴转动俯仰角,最后绕y轴转动横滚角。这一定义导致俯仰角为90度时,其余两个欧拉角会出现奇异。这一现象可以深入讨论分析一下,虽然不是什么高深的学术问题,但是对理解姿态表达很有帮助。
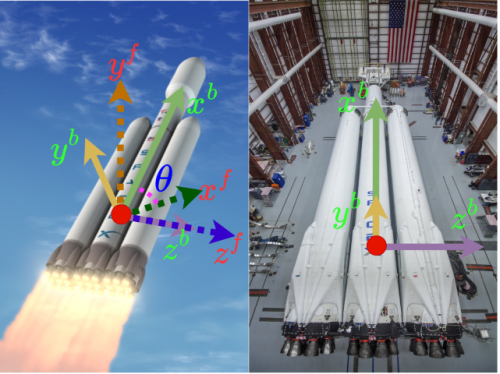
垂直发射中使用的坐标系、
"312"欧拉角定义下,当俯仰角为90度时出现奇异。而对于🚀发射,起竖过程经常跨越90度,导致初始阶段或者飞行中出现欧拉角奇异。
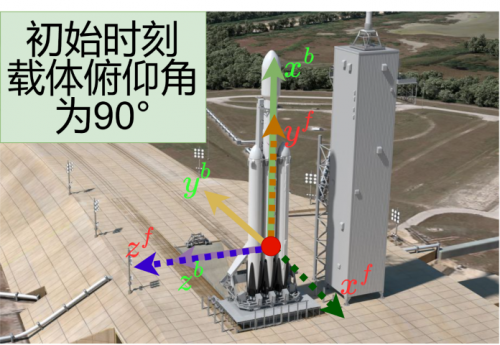
因此垂直发射系统中需要重新定义欧拉角。导弹发射后航向基本不会发生变化,因此可以设置航向角存在奇异点的欧拉角定义,这样俯仰角和横滚角就可以“连续”变化。
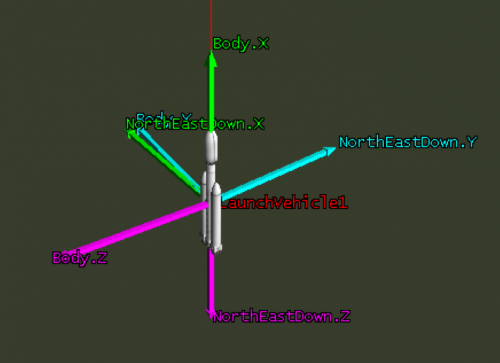
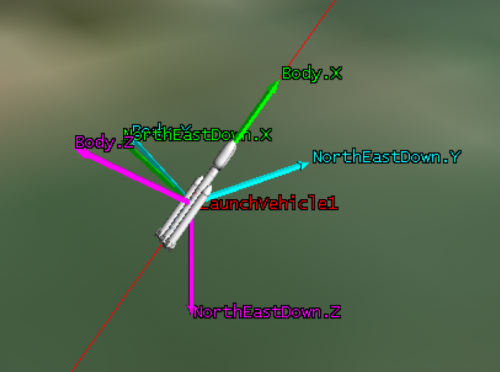
射坐标系和弹体坐标系的关系如图所示:
弹体坐标系为“前上右”,发射坐标系的定义为:x轴在水平面内指向弹体飞行方向,y轴垂直于水平面指向天向,z轴在水平面内与x轴和y轴构成右手系。欧拉角定义的转动顺序为,俯仰角\Rightarrow航向角\Rightarrow横滚角。
火箭平躺在地面上时,初始姿态角为0,垂直发射时俯仰角为90度。
其他场景中的坐标系选择
欧拉角的奇异点是固有的,我们只能通过修改定义,使其不会出现或者尽可能少地出现在正常的导航场景中。
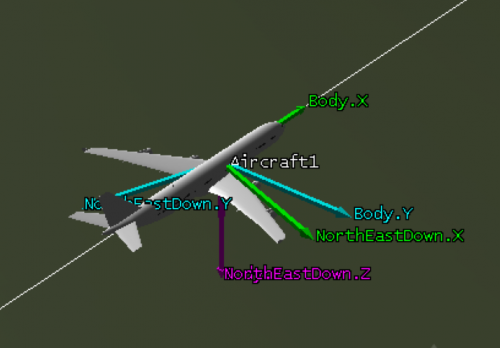
飞机可以选择“前右下”坐标系。
飞机可以选择“前左上”坐标系。
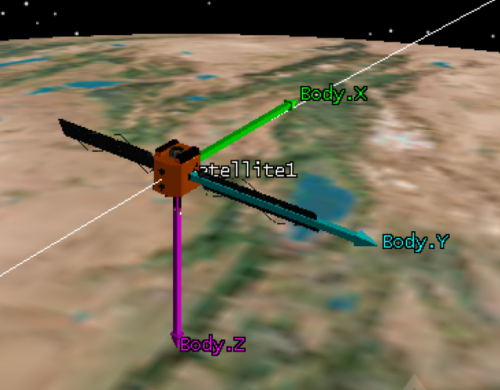

航天器可以选择“前右下”坐标系。
【总结】欧拉角定义原则就是,避免奇异点,尽量满足直观理解。
参考资料
[1] 欧拉角-维基百科
[2] 刘延柱. (2008). 关于刚体姿态的数学表达. 力学与实践.