这两天要做个报告的ppt,在网上搜索传统捷联惯导算法的资料,无意间看到一篇论文,公式都是熟悉的四元数解算公式,就想找一下有没有可以放在ppt里介绍的内容。结果看后边的内容就的感觉就像吃瓜一样,惊喜不断。
先说一下论文讲了什么
这样高大上的文章,我肯定读不懂了,就交给AI帮忙吧。
该文介绍了使用第三阶泰勒级数表达式表示姿态变化四元数的概念,并与常用的姿态变化四元数表达式进行了比较。通过三例样本的姿态变化四元数表达式,模拟和实验验证了其有效性。最后得出了结论。文章中涉及的数学表达式较为复杂,但结果表明第三阶泰勒级数表达式可以更准确地描述姿态变化四元数的变化过程。
被图片吸引
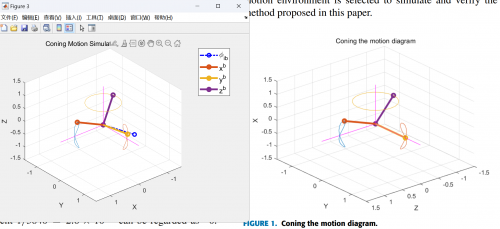
论文第一幅图是圆锥运动示意图,这明显用的是psins工具箱呀,那肯定也是研究捷联惯导的学者,就接着往下看仿真和试验。
这也许是巧合,选择了一样的画图方式和一样的颜色而已。如果是借用了开源代码,肯定会在文中进行说明或者末尾增加致谢,但是什么页没有,那就说明是原创了。
奇怪的仿真条件
既然研究高精度数值解算,那肯定是要和单子样算法说Bye Bye的。给出单子样条件的4阶RK解算是什么意思呢?
单子样条件怎么实现角速度函数拟合呢?对于高精度SINS算法,单子样条件是没有意义的,仿真中出现单子样条件,试验结果也给的是单子样,实在是无法理解。
叹为观止的试验条件
高精度捷联惯导解算算法研究很少出现试验验证,因为算法精度太高了。
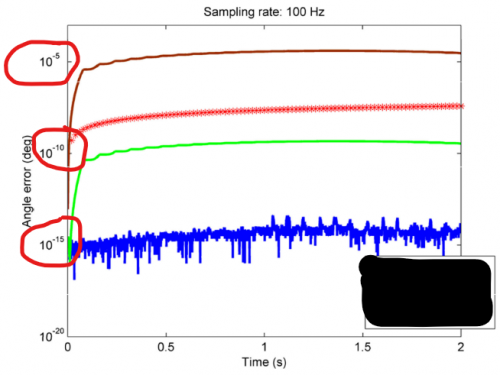
这是一篇权威的算法研究成果,新算法的2s的精度是10e-5deg,参与对比的算法至少也是10e-5deg,而这篇文章新提出算法2s的误差是8e-3deg。
按照2s内误差8e-3deg分析,试验的50s最多产生0.2deg的姿态误差,这还是全程圆锥运动的极端条件下,车载试验根本不可能激励这么大的误差。
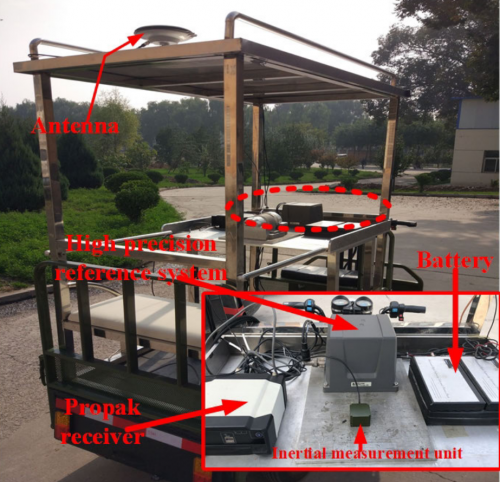
但是这篇文章竟然用MEMS-IMU的车载惯导系统完成了圆锥误差补偿的测试。
这个试验平台没有问题,很完整,要想测试高精度惯导算法,它根本不配。要测试高精度算法也要用参考IMU进行纯惯导,而不是低成本的MEMS-IMU。
难以置信的试验结果
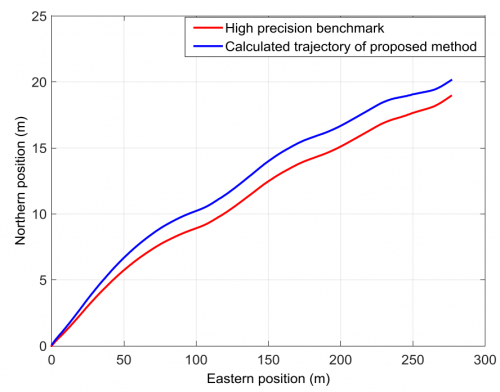
既然是测试算法,为什么不给出不同算法解算出的轨迹,而只有提出的算法和参考之间的对比,没什么意义呀。当然,这只是小问题。
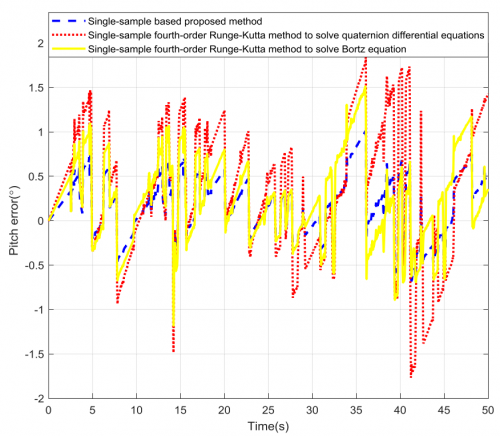
下边两幅图是俯仰角和航向角的对比,这幅图和常见的惯导姿态解算结果就相差很大。
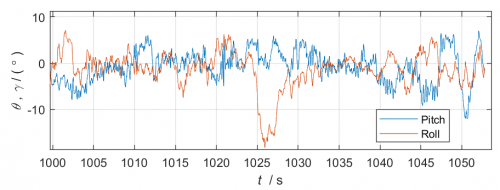
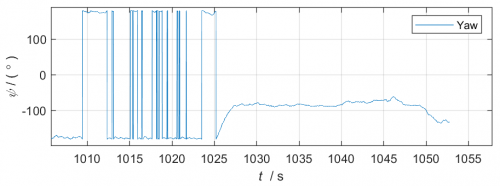
贴两张之前用手机采集的数据做的解算,1000s开始进行纯惯导解算。
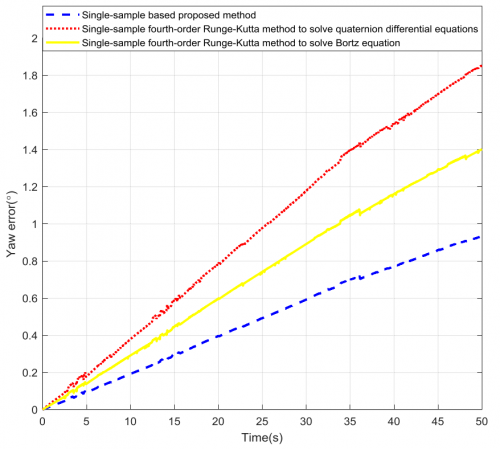
最后给出了航向对比,仅仅50s时间,三种算法的航向相差1度以上。
那这武器装备要是不使用论文提出的算法,根本不可能命中目标了。