超高精度捷联惯导放着测试程序中包含文中提到的超高精度捷联惯导算法、三种统一捷联惯导力学编排和以上算法的仿真测试程序。各种算法给出了相应的计算函数或捷联惯导更新函数,配合相应的子函数库以及m文件中嵌入的子函数实现捷联惯导解算。输入输出的定义和函数使用方法在注释中均有说明。
介绍
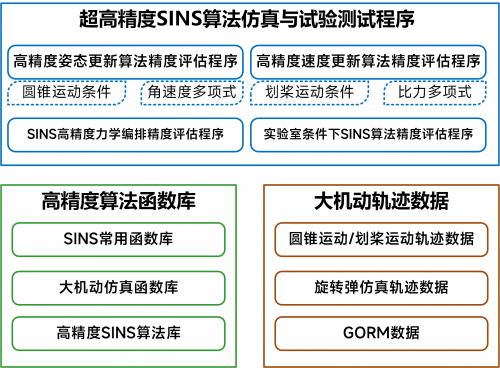
程序结构如下图所示,超高精度SINS算法程序文件分为三部分:算法仿真程序、高精度算法函数库和大机动轨迹数据。
算法仿真程序由多种不同的超高精度捷联惯导算法构成,每种算法存放在一个对应的文件夹中,例如:“PWQHN”表示分段四元数高阶数值算法、“QuatFIter”表示四元数函数迭代算法。算法精度仿真主要是在几种不同的大机动条件下完成算法精度对比,分析不同条件下的超高精度算法精度。
仿真程序基于psins-toolbox开发(http://www.psins.org.cn/kydm),变量定义、函数结构、参数和常量直接使用了工具箱中的程序和定义。
使用说明
每个文件夹中都会有相应的ReadMe文件,给出程序简介、使用方法和仿真结果。
high-accuracy-SINS-functions 中是常用的高精度算法相关的函数,大部分提取自psins-toolbox,没有这些函数的支持,各个高精度算法中的程序无法正常运行。
high-dynamic-maneuver-trajectory-data 中是在仿真中保存的高动态测试数据,包括不同条件的圆锥运动、划桨运动、两种不同的角速度和比力多项式运动轨迹、以及旋转弹仿真轨迹数据。这些仿真数据的imu精度高于
psins-toolbox中的轨迹仿真程序的精度,适用于超高精度捷联惯导算法分析。
QuatFIter 中为四元数函数迭代算法的仿真程序,此算法在不同半锥角条件下与传统的多子样补偿算法对比。
参考文献
- YANG X K, YAN G M, LI N, etc. A Super-high-accuracy Attitude Measurement Method of SINS based on PWQHN Algorithm in the High-dynamic Maneuver Environment[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 72. DOI:10.1109/TIM.20-22.3232737.
- YANG X K, YAN G M, LIU F, etc. Analysis Method of Strapdown Inertial Navigation Error Distribution Based on Covariance Matrix Decomposition[C/OL]//Chinese Control Conference, CCC. DOI:10.48550/arXiv.2203.11810.
- YANG X K, YAN G M, LI S H. A High-Accuracy Velocity Algorithm of SINS Based on Polynomial of Specific Force[C]. Chinese Control Conference, CCC. IEEE Computer Society, 2021: 3594–3599.
- 杨小康, 严恭敏, 李思锦等. 一种地理系下基于伪线性模型的捷联惯导算法[J]. 宇航学报, 2022, 43(9): 1227–1235.
- 杨小康, 杨浩, 严恭敏, 李四海. 基于Legendre多项式的一种高精度捷联惯导姿态更新算法[J]. 西北工业大学学报, 2022, 40(5):1021-1029.